5.1.10. nvector.objects.GeoPath¶
- class GeoPath(point_a, point_b)[source]¶
Geographical path between two positions in Frame E
- Parameters
- point_a, point_b: Nvector, GeoPoint or ECEFvector objects
The path is defined by the line between position A and B, decomposed in E.
Notes
Please note that either position A or B or both might be a vector of points. In this case the GeoPath instance represents all the paths between the positions of A and the corresponding positions of B.
Examples
Example 5: “Surface distance”
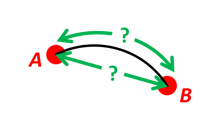
Find the surface distance sAB (i.e. great circle distance) between two positions A and B. The heights of A and B are ignored, i.e. if they don’t have zero height, we seek the distance between the points that are at the surface of the Earth, directly above/below A and B. The Euclidean distance (chord length) dAB should also be found. Use Earth radius 6371e3 m. Compare the results with exact calculations for the WGS-84 ellipsoid.
- Solution for a sphere:
>>> import numpy as np >>> import nvector as nv >>> frame_E = nv.FrameE(a=6371e3, f=0) >>> positionA = frame_E.GeoPoint(latitude=88, longitude=0, degrees=True) >>> positionB = frame_E.GeoPoint(latitude=89, longitude=-170, degrees=True)
>>> s_AB, azia, azib = positionA.distance_and_azimuth(positionB) >>> p_AB_E = positionB.to_ecef_vector() - positionA.to_ecef_vector() >>> d_AB = p_AB_E.length
>>> msg = 'Ex5: Great circle and Euclidean distance = {}' >>> msg = msg.format('{:5.2f} km, {:5.2f} km') >>> msg.format(s_AB / 1000, d_AB / 1000) 'Ex5: Great circle and Euclidean distance = 332.46 km, 332.42 km'
- Alternative sphere solution:
>>> path = nv.GeoPath(positionA, positionB) >>> s_AB2 = path.track_distance(method='greatcircle') >>> d_AB2 = path.track_distance(method='euclidean') >>> msg.format(s_AB2 / 1000, d_AB2 / 1000) 'Ex5: Great circle and Euclidean distance = 332.46 km, 332.42 km'
- Exact solution for the WGS84 ellipsoid:
>>> wgs84 = nv.FrameE(name='WGS84') >>> point1 = wgs84.GeoPoint(latitude=88, longitude=0, degrees=True) >>> point2 = wgs84.GeoPoint(latitude=89, longitude=-170, degrees=True) >>> s_12, azi1, azi2 = point1.distance_and_azimuth(point2)
>>> p_12_E = point2.to_ecef_vector() - point1.to_ecef_vector() >>> d_12 = p_12_E.length >>> msg = 'Ellipsoidal and Euclidean distance = {:5.2f} km, {:5.2f} km' >>> msg.format(s_12 / 1000, d_12 / 1000) 'Ellipsoidal and Euclidean distance = 333.95 km, 333.91 km'
Example 6 “Interpolated position”
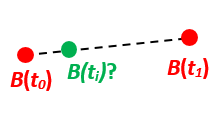
Given the position of B at time t0 and t1, n_EB_E(t0) and n_EB_E(t1).
Find an interpolated position at time ti, n_EB_E(ti). All positions are given as n-vectors.
- Solution:
>>> import nvector as nv >>> wgs84 = nv.FrameE(name='WGS84') >>> n_EB_E_t0 = wgs84.GeoPoint(89, 0, degrees=True).to_nvector() >>> n_EB_E_t1 = wgs84.GeoPoint(89, 180, degrees=True).to_nvector() >>> path = nv.GeoPath(n_EB_E_t0, n_EB_E_t1)
>>> t0 = 10. >>> t1 = 20. >>> ti = 16. # time of interpolation >>> ti_n = (ti - t0) / (t1 - t0) # normalized time of interpolation
>>> g_EB_E_ti = path.interpolate(ti_n).to_geo_point()
>>> lat_ti, lon_ti, z_ti = g_EB_E_ti.latlon_deg >>> msg = 'Ex6, Interpolated position: lat, lon = {:2.1f} deg, {:2.1f} deg' >>> msg.format(lat_ti, lon_ti) 'Ex6, Interpolated position: lat, lon = 89.8 deg, 180.0 deg'
- Vectorized solution:
>>> t = np.array([10, 20]) >>> nvectors = wgs84.GeoPoint([89, 89], [0, 180], degrees=True).to_nvector() >>> nvectors_i = nvectors.interpolate(ti, t, kind='linear') >>> lati, loni, zi = nvectors_i.to_geo_point().latlon_deg >>> msg.format(lat_ti, lon_ti) 'Ex6, Interpolated position: lat, lon = 89.8 deg, 180.0 deg'
Example 9: “Intersection of two paths”
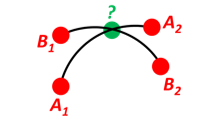
Define a path from two given positions (at the surface of a spherical Earth), as the great circle that goes through the two points.
Path A is given by A1 and A2, while path B is given by B1 and B2.
Find the position C where the two great circles intersect.
- Solution:
>>> import nvector as nv >>> pointA1 = nv.GeoPoint(10, 20, degrees=True) >>> pointA2 = nv.GeoPoint(30, 40, degrees=True) >>> pointB1 = nv.GeoPoint(50, 60, degrees=True) >>> pointB2 = nv.GeoPoint(70, 80, degrees=True) >>> pathA = nv.GeoPath(pointA1, pointA2) >>> pathB = nv.GeoPath(pointB1, pointB2)
>>> pointC = pathA.intersect(pathB) >>> pointC = pointC.to_geo_point() >>> lat, lon = pointC.latitude_deg, pointC.longitude_deg >>> msg = 'Ex9, Intersection: lat, lon = {:4.4f}, {:4.4f} deg' >>> msg.format(lat, lon) 'Ex9, Intersection: lat, lon = 40.3186, 55.9019 deg'
- Check that PointC is not between A1 and A2 or B1 and B2:
>>> pathA.on_path(pointC) False >>> pathB.on_path(pointC) False
- Check that PointC is on the great circle going through path A and path B:
>>> pathA.on_great_circle(pointC) True >>> pathB.on_great_circle(pointC) True
Example 10: “Cross track distance”
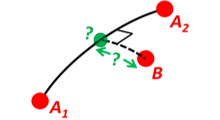
Path A is given by the two positions A1 and A2 (similar to the previous example).
Find the cross track distance sxt between the path A (i.e. the great circle through A1 and A2) and the position B (i.e. the shortest distance at the surface, between the great circle and B).
Also find the Euclidean distance dxt between B and the plane defined by the great circle. Use Earth radius 6371e3.
Finally, find the intersection point on the great circle and determine if it is between position A1 and A2.
- Solution:
>>> import numpy as np >>> import nvector as nv >>> frame = nv.FrameE(a=6371e3, f=0) >>> pointA1 = frame.GeoPoint(0, 0, degrees=True) >>> pointA2 = frame.GeoPoint(10, 0, degrees=True) >>> pointB = frame.GeoPoint(1, 0.1, degrees=True) >>> pathA = nv.GeoPath(pointA1, pointA2)
>>> s_xt = pathA.cross_track_distance(pointB, method='greatcircle') >>> d_xt = pathA.cross_track_distance(pointB, method='euclidean')
>>> val_txt = '{:4.2f} km, {:4.2f} km'.format(s_xt/1000, d_xt/1000) >>> 'Ex10: Cross track distance: s_xt, d_xt = {}'.format(val_txt) 'Ex10: Cross track distance: s_xt, d_xt = 11.12 km, 11.12 km'
>>> pointC = pathA.closest_point_on_great_circle(pointB) >>> np.allclose(pathA.on_path(pointC), True) True
Methods
__init__(point_a, point_b)Initialize self.
closest_point_on_great_circle(point)Returns closest point on great circle path to the point.
closest_point_on_path(point)Returns closest point on great circle path segment to the point.
cross_track_distance(point[, method, radius])Returns cross track distance from path to point.
ecef_vectors()Returns point_a and point_b as ECEF-vectors
geo_points()Returns point_a and point_b as geo-points
interpolate(ti)Returns the interpolated point along the path
intersect(path)Returns the intersection(s) between the great circles of the two paths
intersection(**kwds)intersection is deprecated, use intersect instead!
nvector_normals()Returns nvector normals for position a and b
nvectors()Returns point_a and point_b as n-vectors
on_great_circle(point[, atol])Returns True if point is on the great circle within a tolerance.
on_path(point[, method, rtol, atol])Returns True if point is on the path between A and B witin a tolerance.
track_distance([method, radius])Returns the path distance computed at the average height.
Attributes
positionApositionA is deprecated, use point_a instead!
positionBpositionB is deprecated, use point_b instead!