5.2.17. nvector.core.n_EA_E_distance_and_azimuth2n_EB_E¶
- n_EA_E_distance_and_azimuth2n_EB_E(n_EA_E, distance_rad, azimuth, R_Ee=None)[source]¶
Returns position B from azimuth and distance from position A
- Parameters
- n_EA_E: 3 x n array
n-vector(s) [no unit] of position A decomposed in E.
- distance_rad: n, array
great circle distance [rad] from position A to B
- azimuth: n array
Angle [rad] the line makes with a meridian, taken clockwise from north.
- Returns
- n_EB_E: 3 x n array
n-vector(s) [no unit] of position B decomposed in E.
Notes
The result for spherical Earth is returned.
Examples
Example 8: “A and azimuth/distance to B”
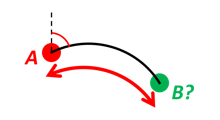
We have an initial position A, direction of travel given as an azimuth (bearing) relative to north (clockwise), and finally the distance to travel along a great circle given as sAB. Use Earth radius 6371e3 m to find the destination point B.
In geodesy this is known as “The first geodetic problem” or “The direct geodetic problem” for a sphere, and we see that this is similar to Example 2, but now the delta is given as an azimuth and a great circle distance. (“The second/inverse geodetic problem” for a sphere is already solved in Examples 1 and 5.)
- Solution:
>>> import nvector as nv >>> from nvector import rad, deg >>> lat, lon = rad(80), rad(-90)
>>> n_EA_E = nv.lat_lon2n_E(lat, lon) >>> azimuth = rad(200) >>> s_AB = 1000.0 # [m] >>> r_earth = 6371e3 # [m], mean earth radius
>>> distance_rad = s_AB / r_earth >>> n_EB_E = nv.n_EA_E_distance_and_azimuth2n_EB_E(n_EA_E, distance_rad, azimuth) >>> lat_EB, lon_EB = nv.n_E2lat_lon(n_EB_E) >>> lat, lon = deg(lat_EB), deg(lon_EB) >>> msg = 'Ex8, Destination: lat, lon = {:4.4f} deg, {:4.4f} deg' >>> msg.format(lat[0], lon[0]) 'Ex8, Destination: lat, lon = 79.9915 deg, -90.0177 deg'