5.2.2. nvector.core.cross_track_distance¶
- cross_track_distance(path, n_EB_E, method='greatcircle', radius=6371009.0)[source]¶
Returns cross track distance between path A and position B.
- Parameters
- path: tuple of 2 n-vectors
2 n-vectors of positions defining path A, decomposed in E.
- n_EB_E: 3 x m array
n-vector(s) of position B to measure the cross track distance to.
- method: string
defining distance calculated. Options are: ‘greatcircle’ or ‘euclidean’
- radius: real scalar
radius of sphere. (default 6371009.0)
- Returns
- distancearray of length max(n, m)
cross track distance(s)
Notes
The result for spherical Earth is returned.
Examples
Example 10: “Cross track distance”
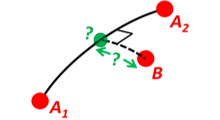
Path A is given by the two positions A1 and A2 (similar to the previous example).
Find the cross track distance sxt between the path A (i.e. the great circle through A1 and A2) and the position B (i.e. the shortest distance at the surface, between the great circle and B).
Also find the Euclidean distance dxt between B and the plane defined by the great circle. Use Earth radius 6371e3.
Finally, find the intersection point on the great circle and determine if it is between position A1 and A2.
- Solution:
>>> import numpy as np >>> import nvector as nv >>> from nvector import rad, deg >>> n_EA1_E = nv.lat_lon2n_E(rad(0), rad(0)) >>> n_EA2_E = nv.lat_lon2n_E(rad(10), rad(0)) >>> n_EB_E = nv.lat_lon2n_E(rad(1), rad(0.1)) >>> path = (n_EA1_E, n_EA2_E) >>> radius = 6371e3 # mean earth radius [m] >>> s_xt = nv.cross_track_distance(path, n_EB_E, radius=radius) >>> d_xt = nv.cross_track_distance(path, n_EB_E, method='euclidean', ... radius=radius)
>>> val_txt = '{:4.2f} km, {:4.2f} km'.format(s_xt[0]/1000, d_xt[0]/1000) >>> 'Ex10: Cross track distance: s_xt, d_xt = {0}'.format(val_txt) 'Ex10: Cross track distance: s_xt, d_xt = 11.12 km, 11.12 km'
>>> n_EC_E = nv.closest_point_on_great_circle(path, n_EB_E) >>> np.allclose(nv.on_great_circle_path(path, n_EC_E, radius), True) True
- Alternative solution 2:
>>> s_xt2 = nv.great_circle_distance(n_EB_E, n_EC_E, radius) >>> d_xt2 = nv.euclidean_distance(n_EB_E, n_EC_E, radius) >>> np.allclose(s_xt, s_xt2), np.allclose(d_xt, d_xt2) (True, True)
- Alternative solution 3:
>>> c_E = nv.great_circle_normal(n_EA1_E, n_EA2_E) >>> sin_theta = -np.dot(c_E.T, n_EB_E).ravel() >>> s_xt3 = np.arcsin(sin_theta) * radius >>> d_xt3 = sin_theta * radius >>> np.allclose(s_xt, s_xt3), np.allclose(d_xt, d_xt3) (True, True)